
Unusually blue and bright stars may not have only themselves to thank for their uniqueness. A new study looks at one way these unconventional objects might form in clusters … with a little help from a friend.
Cluster Stand-Outs
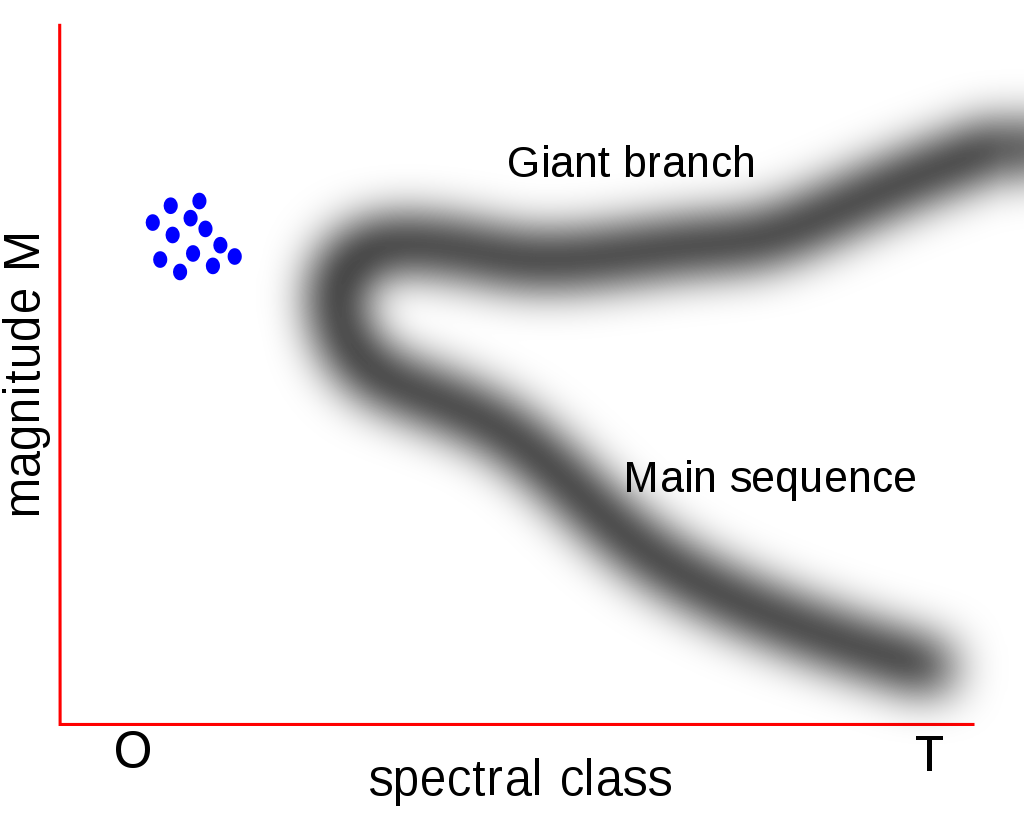
Sketch of a Hertzsprung–Russell diagram for a star cluster. Blue stragglers lie above the main-sequence turnoff point for the rest of the stars in the cluster. [RicHard-59]
{kind=link}
But a few stars defy this logic. These so-called “blue stragglers” seem to have been left behind as their fellow cluster inhabitants evolved without them; on the H–R diagram, blue stragglers lie alone above the main-sequence turnoff point, shining brighter and bluer than they should be.
Just a Little Boost?
What causes these unorthodox stars? The simplest explanation is that they are main-sequence stars that belatedly received a bump in their mass. Theorists favor two possible formation channels:
- Mass transfer from an evolved donor onto a main-sequence star in a binary, which increases the main-sequence star’s mass and consequently causes it to become brighter and hotter.
- Collision and merger of two main-sequence stars, which forms a new, more massive main-sequence star that is brighter and hotter than usual.
But these two channels can only explain some observed blue stragglers; other systems — like WOCS ID 7782, a binary consisting of two blue stragglers in a 10-day orbit — are unlikely to have formed in either of these ways.
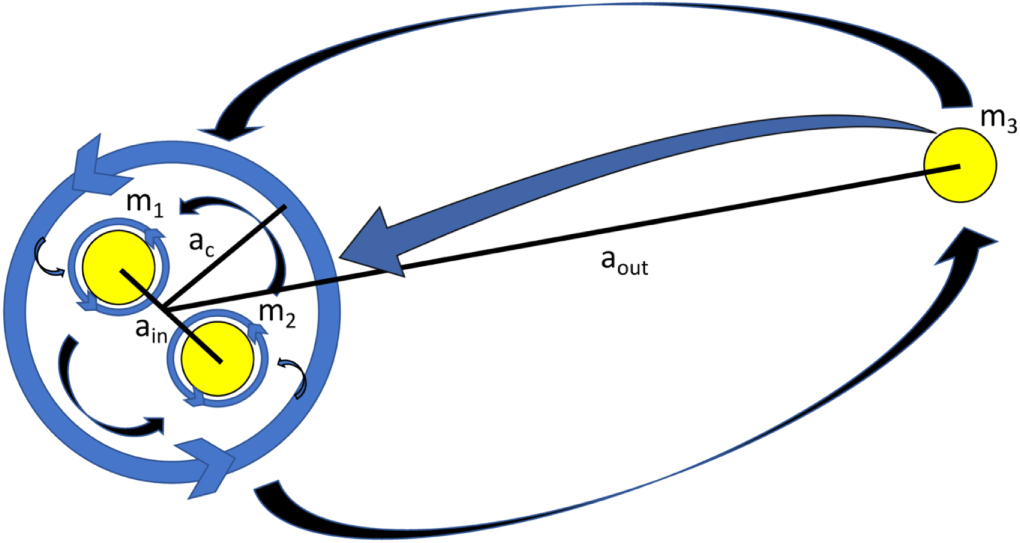
Schematic detailing the authors’ proposed scenario for the formation of WOCS 7782, in which a binary pair of main-sequence stars have material fed onto them by an evolved outer tertiary companion. [Portegies Zwart & Leigh 2019]
A Third Star in the Mix
Portegies Zwart and Leigh’s model relies on one important element: a third star. In their proposed scenario, two main-sequence stars in a close binary are orbited by a giant, evolved companion star. As this evolved star ages and overflows its Roche lobe, gas flows from it onto the main-sequence binary, increasing the masses of the two inner stars.
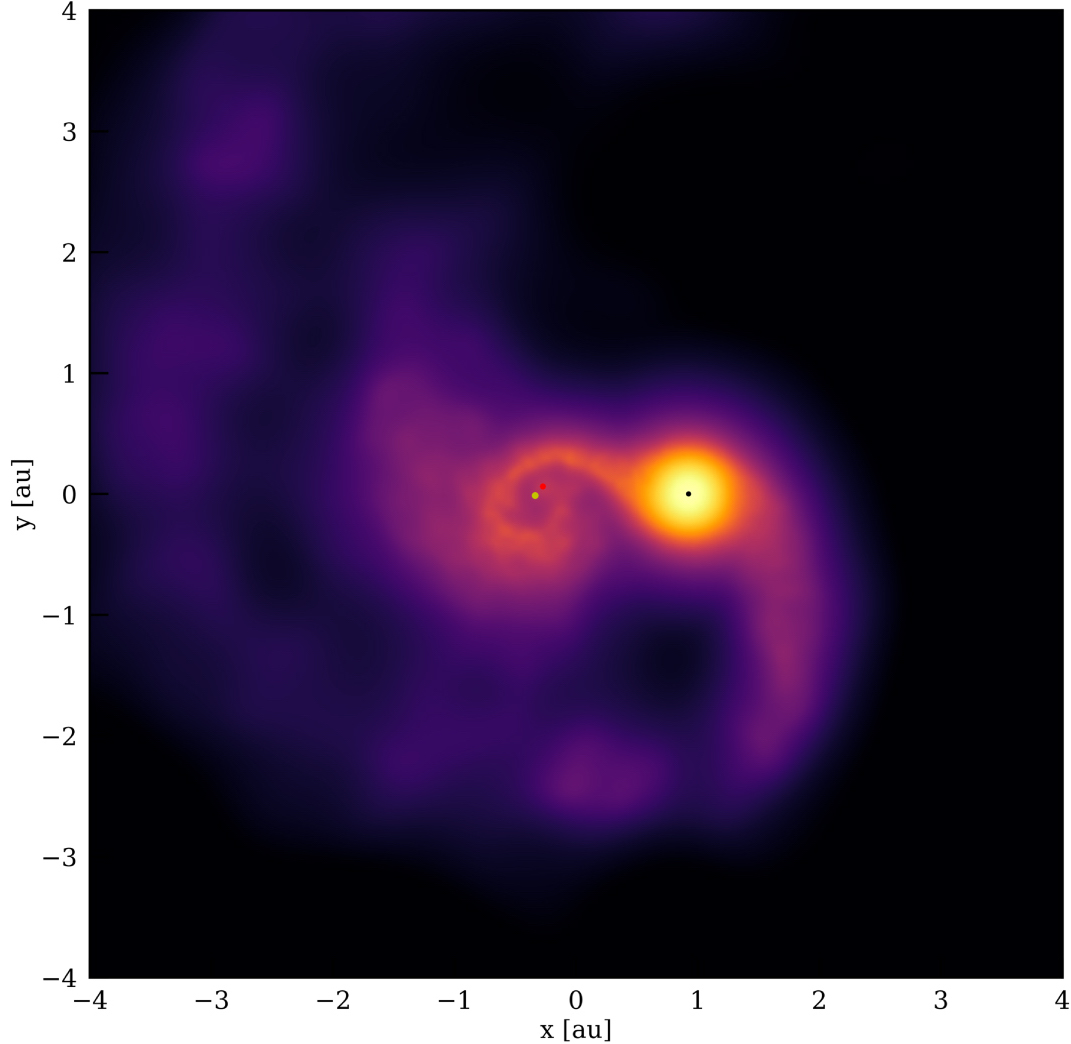
Snapshot from one of the authors’ simulated triple systems. The binary system at left is being fed by gas from the outer tertiary companion on the right. [Portegies Zwart & Leigh 2019]
In addition to potentially explaining WOCS ID 7782, Portegies Zwart and Leigh’s model can produce a number of other masses, geometries, and configurations for blue-straggler systems, depending on the initial masses and separations of the binary and the outer companion. This formation scenario — which relies on just a little help from a friend — may therefore go a long way toward explaining the formation of the blue-straggler systems that have stumped us before now.
Citation
“A Triple Origin for Twin Blue Stragglers in Close Binaries,” Simon Portegies Zwart and Nathan W. C. Leigh 2019 ApJL 876 L33. doi:10.3847/2041-8213/ab1b75